

Nel lontano 1970 i primi esemplari robotici fecero il loro ingresso nell’industria automobilistica, rivoluzionandola. Da quel periodo in poi sono molti i settori in cui sono stati impiegati, specie nelle linee produttive. Se c’è però un comparto dove i robot non hanno ancora attecchito a discapito delle potenzialità che potrebbero essere enormi è quello dell’edilizia.
L’industria delle costruzioni è più complessa di altre. I cantieri sono ambienti complessi e in costante evoluzione. I robot dovrebbero essere sufficientemente forti per poter gestire materiali pesanti ma al contempo piccoli e leggeri da riuscire ad entrare negli edifici e flessibili per potervici muovere agevolmente. A fronte di queste difficoltà, i vantaggi dell’utilizzo di macchine robotiche potrebbero essere enormi, primo fra tutti la possibilità di assemblare strutture complesse in situ, ottimizzando il lavoro e riducendo i costi di trasporto.
A che punto siamo?
Una delle ricerche più interessanti attualmente in corso è quella capitanata dal ricercatore Markus Giftthaler dell'ETH di Zurigo in Svizzera che ha sviluppato una nuova classe di robot particolarmente performante. Il prototipo di chiama In Situ Fabricator 1 ed è stato progettato con un approccio ‘bottom up’ al fine di una maggiore praticità.
In Situ Fabricator 1, semi-autonomo grazie a sensori e telecamere
Il robot è stato progettato per funzionare in modo semi-autonomo in un ambiente mutevole e complesso, riesce a raggiungere l'altezza di una parete standard e passare attraverso porte normali. E’ resistente alla pioggia e alla polvere, è elettrico e ha una batteria di backup. Funziona attraverso un collegamento internet di modo che il progettista o l’architetto possa apportare delle modifiche in tempo reale. Grazie a un sistema di sensori e di telecamere riesce a percepire l’ambiente che lo circonda e un braccio robotico potente e flessibile gli consente di posizionare i vari elementi costruttivi.
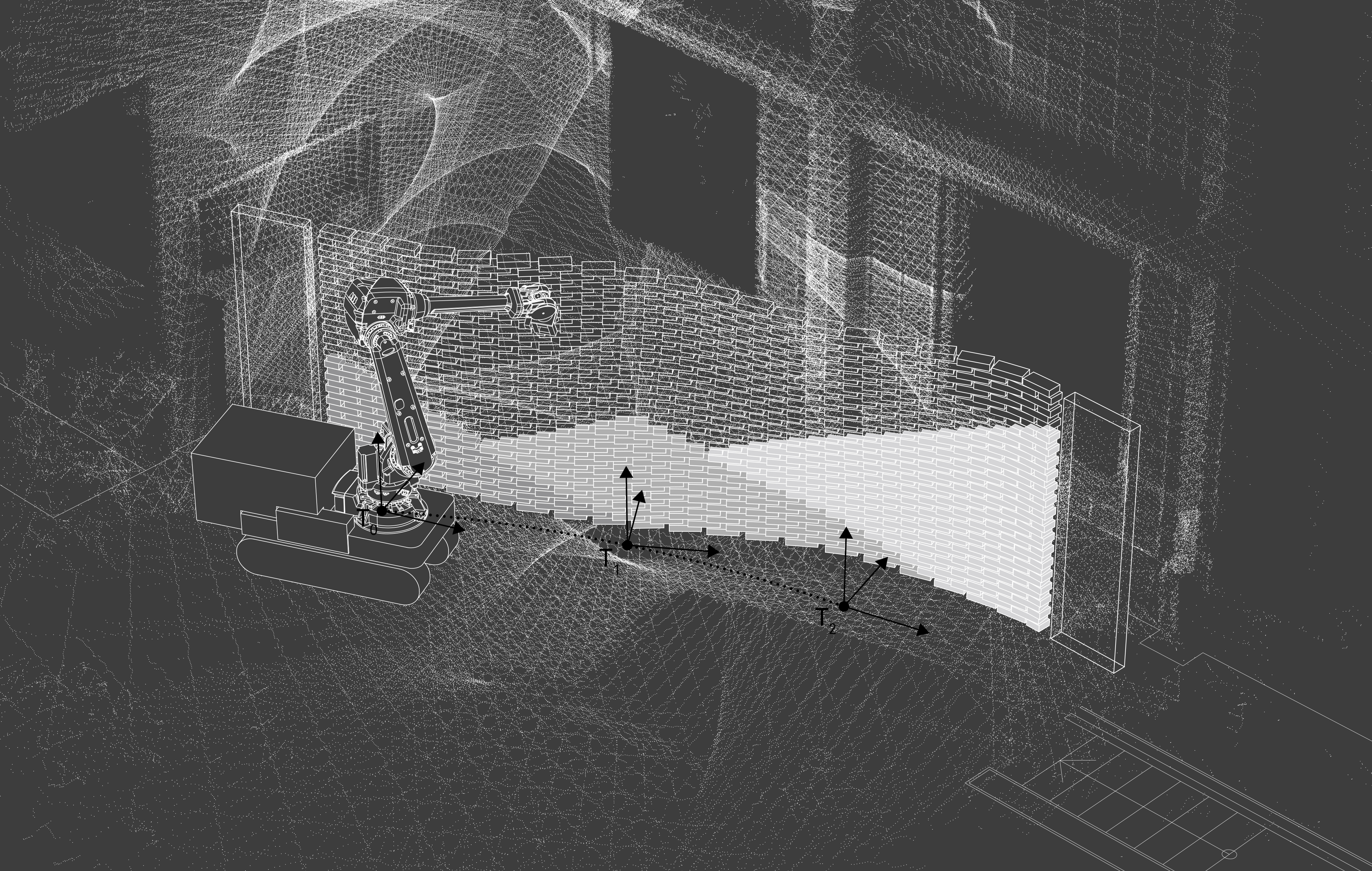
Per dimostrare le capacità del loro prototipo il team di Giftthaler lo hanno utilizzato per costruire un paio di strutture in un cantiere sperimentale in Svizzera chiamato NEST. Il primo è un doppio muro di mattoni ondulato lungo 6,5 metri e alto due, composto di 1600 blocchi. Posizionare un muro del genere in cantiere non è semplice. E In Situ Fabricator 1 ci riesce mettendo a confronto la mappa del cantiere che ha raccolto dai suoi sensori con i piani dell'architetto. Ma anche in questo caso, deve avere la flessibilità necessaria per consentire problemi imprevisti, come terreno irregolare o cedimenti di materiale che cambia forma di una struttura.
Il secondo compito era di quello di saldare alcuni fili per formare una complessa maglia di acciaio curvo che deve essere poi riempita di calcestruzzo. Anche in questo caso in Situ Fabricator1 si è dimostrato all’altezza, anche se per non rischiare di rovinare la struttura deve, ad ogni singolo passaggio, valutarne la forma ed eventualmente modificare alcune operazioni.
I limiti da superare
Nonostante questi risultati siano strabilianti soprattutto se confrontati ad altri esemplari al vaglio, In Situ Fabricator 1 non è perfetto. Il robot è ad esempio troppo pesante (pesa quasi 1,5 tonnellate) per entrare nella maggior parte degli edifici. Si dovrebbe arrivare a un peso di 500 kg, non di più. E su questo i ricercatori stanno lavorando. Ma forse il limite più grande è nella forza dei bracci robotici, che attualmente sono in grado di manipolare elementi fino a circa 40 kg ma per poter essere realmente utili dovrebbero riuscire a farlo con strutture che pesino almeno 60 kg.
Ma che lo spinge contro un limite pratico. Nel braccio di Situ Fabricator1 è controllata da motori elettrici che sono incapaci di manipolazione di oggetti pesanti con lo stesso livello di precisione. Cosa c'è di più, i motori elettrici sono notoriamente inaffidabili nelle condizioni presenti nei cantieri edili, che è il motivo per cui macchinari più pesanti su questi siti è di tipo idraulico.
Al vaglio la seconda versione
Per risolvere questa problematica il team di ricerca ha progettato e costruito un attuatore idraulico che riesce a controllare un braccio robotizzato di nuova generazione durante la manipolazione di oggetti pesanti in modo più affidabile e con la stessa precisione. La versione aggiornata del prototipo di robot per i cantieri edili si chiama In Situ Fabricator 2 e dovrebbe essere pronto entro la fine di quest'anno.

